澎思科技車輛再識(shí)別(Vehicle ReID)刷新世界紀(jì)錄智能
澎思科技車輛再識(shí)別(Vehicle ReID)技術(shù)在非受限場(chǎng)景車輛再識(shí)別數(shù)據(jù)集VERI-Wild上的成績(jī)刷新世界紀(jì)錄,并打破了VCIP 2019車輛再識(shí)別大型挑戰(zhàn)賽的最好成績(jī)。
近日,澎思科技車輛再識(shí)別(Vehicle ReID)技術(shù)在非受限場(chǎng)景車輛再識(shí)別數(shù)據(jù)集VERI-Wild上的成績(jī)刷新世界紀(jì)錄,并打破了VCIP 2019車輛再識(shí)別大型挑戰(zhàn)賽的最好成績(jī)。澎思科技基于自主研發(fā)的全局和局部深度特征融合算法模型,實(shí)現(xiàn)了車輛再識(shí)別算法關(guān)鍵指標(biāo)平均精度均值(Mean Average Precision,mAP)和首位命中率(Rank-1 Accuracy)的大幅度提升,在VERI-Wild數(shù)據(jù)集上平均精度均值mAP達(dá)到85.35%。
車輛再識(shí)別在智慧城市和公共安全方面有著廣泛的應(yīng)用前景和至關(guān)重要的作用,一直是計(jì)算機(jī)視覺(jué)領(lǐng)域研究的焦點(diǎn)。澎思科技持續(xù)深化面向場(chǎng)景的AI技術(shù)研發(fā)與創(chuàng)新,在非受限場(chǎng)景下的車輛再識(shí)別取得突破,彰顯了公司在落地應(yīng)用場(chǎng)景化的計(jì)算機(jī)視覺(jué)技術(shù)實(shí)力。
車輛再識(shí)別面臨的挑戰(zhàn)以及VERI-Wild數(shù)據(jù)集的推出
車輛再識(shí)別,也稱為車輛檢索,旨在找到不同監(jiān)控場(chǎng)景下的同一輛車。近期隨著深度學(xué)習(xí)技術(shù)的發(fā)展,車輛再識(shí)別算法效率顯著提升。然而現(xiàn)有數(shù)據(jù)集的限制過(guò)度簡(jiǎn)化了車輛再識(shí)別面臨的現(xiàn)實(shí)挑戰(zhàn),使得基于大部分現(xiàn)有數(shù)據(jù)集開(kāi)發(fā)和評(píng)估的ReID模型在真實(shí)場(chǎng)景中的泛化能力可能存在問(wèn)題。真實(shí)監(jiān)控情景中的車輛再識(shí)別仍然面臨高度視角差異、極端照明條件、復(fù)雜背景和不同的攝像頭來(lái)源等挑戰(zhàn)。非受限場(chǎng)景車輛再識(shí)別數(shù)據(jù)集VERI-Wild的推出就致力于解決這些問(wèn)題。
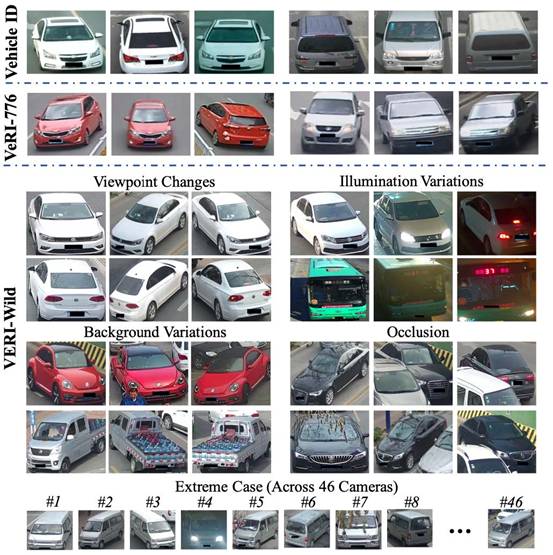
VERI-Wild與VehicleID、VeRI-776數(shù)據(jù)集的樣本比較
VERI-Wild是在2019年CVPR期間對(duì)外發(fā)布的車輛再識(shí)別數(shù)據(jù)集。該數(shù)據(jù)集由40,000個(gè)車輛標(biāo)識(shí)中的400,000張圖像以及諸如車輛品牌、顏色和車型等附加信息組成,這些信息可用于增強(qiáng)ReID框架的性能或作為獨(dú)立的采集任務(wù)。VERI-Wild數(shù)據(jù)集旨在應(yīng)對(duì)現(xiàn)有數(shù)據(jù)集在車輛標(biāo)識(shí)和圖像數(shù)量不夠大、攝像頭數(shù)量和覆蓋區(qū)域有限、攝像頭視角高度受限及光照度和天氣狀況沒(méi)有明顯變化等局限性問(wèn)題,是目前最具挑戰(zhàn)的車輛再識(shí)別數(shù)據(jù)集。
澎思科技提出面向車輛再識(shí)別的全局和局部深度特征融合方法
在2019年IEEE視覺(jué)通信和圖像處理國(guó)際會(huì)議(VCIP)期間舉辦的Grand Challenges on Vehicle ReIdentification車輛再識(shí)別大型挑戰(zhàn)賽上,澎思科技提出面向車輛再識(shí)別的全局和局部深度特征融合方法。澎思科技首席科學(xué)家、新加坡研究院院長(zhǎng)申省梅受邀參會(huì),并做了《Global and Local Deep Feature Representation Fusion for Vehicle Re-Identification》的報(bào)告。

澎思科技首席科學(xué)家、新加坡研究院院長(zhǎng)申省梅受邀出席VCIP 2019
由于很多具有不同標(biāo)識(shí)的車輛有著極其相似的外觀,因此澎思算法團(tuán)隊(duì)通過(guò)各種不同的方法,利用車輛的具體部件,選取基于部件的特征來(lái)執(zhí)行模型預(yù)測(cè)。如此一來(lái),模型便能更好地了解部件的獨(dú)有特征。
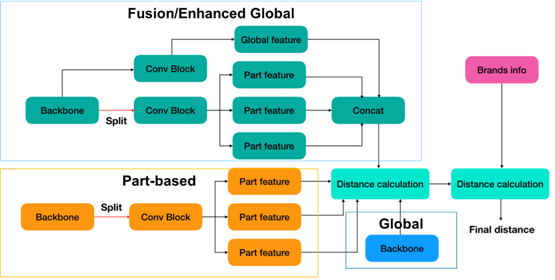
澎思科技提出的全局和局部深度特征融合方法
最近,澎思新加坡研究院車輛再識(shí)別算法團(tuán)隊(duì)考慮到ReID任務(wù)中采用特征向量(不采用分類層)來(lái)計(jì)算距離矩陣,進(jìn)而比較兩個(gè)圖像之間的相似性,分類缺失本身并不足以實(shí)現(xiàn)良好的模型訓(xùn)練。于是,團(tuán)隊(duì)又將深度度量學(xué)習(xí)(DML)應(yīng)用于最新模型中,使得類內(nèi)三聯(lián)體之間的距離小于(至少有某一差距)類間三聯(lián)體之間的距離,從而提升模型的性能表現(xiàn)。
經(jīng)過(guò)測(cè)試,澎思科技提出的車輛再識(shí)別算法模型在VERI-Wild不同大小的三個(gè)測(cè)試集中,性能遠(yuǎn)遠(yuǎn)優(yōu)于基線模型,平均精度均值mAP和首位命中率Rank-1實(shí)現(xiàn)大幅度提升,刷新世界紀(jì)錄。

[1] VERI-Wild: A Large Dataset and a New Method for Vehicle Re-Identification in the Wild
車輛再識(shí)別數(shù)據(jù)集VERI-WILD評(píng)估結(jié)果
同樣,該模型的表現(xiàn)也優(yōu)于VCIP 2019Grand Challenges on Vehicle ReIdentification車輛再識(shí)別大型挑戰(zhàn)賽上排名第一的中科院自動(dòng)化所團(tuán)隊(duì)。
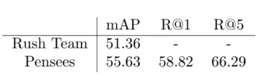
VCIP 2019車輛再識(shí)別大型挑戰(zhàn)賽測(cè)試集結(jié)果對(duì)比
ReID算法持續(xù)優(yōu)化,深化面向場(chǎng)景的AI技術(shù)研發(fā)與創(chuàng)新
行人再識(shí)別和車輛再識(shí)別同屬于目標(biāo)再識(shí)別的兩個(gè)重要任務(wù),主要用于解決目標(biāo)的跨鏡頭跟蹤,通過(guò)場(chǎng)景匹配實(shí)現(xiàn)行人/車輛的跨鏡追蹤以及軌跡預(yù)測(cè)等。ReID是跨攝像頭跟蹤中解決目標(biāo)因?yàn)橐曇皝G失后再匹配最直接的方法,是單攝像頭中多目標(biāo)和單目標(biāo)跟蹤的一種非常有效的特征。澎思科技在目標(biāo)再識(shí)別上積累了豐富的算法,取得了多項(xiàng)世界級(jí)成果,并逐步實(shí)現(xiàn)ReID技術(shù)在智慧城市建設(shè)場(chǎng)景中的落地應(yīng)用。
今年,澎思科技在行人再識(shí)別(PersonReID)和基于視頻的行人再識(shí)別(Video-basedPersonReID)先后取得突破。7月,澎思科技在行人再識(shí)別三大主流數(shù)據(jù)集測(cè)試Market1501、DukeMTMC-reID、CUHK03上算法關(guān)鍵指標(biāo)首位命中率(Rank-1 Accuracy)獲得業(yè)內(nèi)最好成績(jī),刷新了世界紀(jì)錄。8月,澎思科技在基于視頻的行人再識(shí)別三大數(shù)據(jù)集PRID-2011,iLIDS-VID,MARS上同樣刷新世界紀(jì)錄,實(shí)現(xiàn)算法關(guān)鍵指標(biāo)大幅度提升。
此次澎思科技在車輛再識(shí)別(VehicleReID)非受限場(chǎng)景數(shù)據(jù)集下取得的成績(jī),同樣印證了公司堅(jiān)持展開(kāi)面向場(chǎng)景的AI技術(shù)研發(fā)。非受限場(chǎng)景下的車輛再識(shí)別更貼近實(shí)際應(yīng)用場(chǎng)景,澎思科技憑借自研的算法模型,有效提升了算法在諸如高度視角差異、極端照明條件、復(fù)雜背景和多攝像頭來(lái)源等現(xiàn)實(shí)挑戰(zhàn)下的性能表現(xiàn)。接下來(lái),澎思科技將逐步實(shí)現(xiàn)算法在平安城市、智慧交通等領(lǐng)域的落地應(yīng)用。
在人工智能行業(yè)進(jìn)入商業(yè)化落地主導(dǎo)的產(chǎn)業(yè)化階段,澎思科技作為一家專注于計(jì)算機(jī)視覺(jué)和物聯(lián)網(wǎng)技術(shù),提供“以人為核心”行業(yè)綜合應(yīng)用解決方案的人工智能公司,將持續(xù)深化面向場(chǎng)景的AI技術(shù)研發(fā)與創(chuàng)新,針對(duì)用戶需求深挖場(chǎng)景,發(fā)現(xiàn)行業(yè)痛點(diǎn)并不斷打磨算法和產(chǎn)品,將技術(shù)真正應(yīng)用到業(yè)務(wù)場(chǎng)景中,推動(dòng)AI技術(shù)的產(chǎn)品化落地和商業(yè)化進(jìn)程。
1.TMT觀察網(wǎng)遵循行業(yè)規(guī)范,任何轉(zhuǎn)載的稿件都會(huì)明確標(biāo)注作者和來(lái)源;
2.TMT觀察網(wǎng)的原創(chuàng)文章,請(qǐng)轉(zhuǎn)載時(shí)務(wù)必注明文章作者和"來(lái)源:TMT觀察網(wǎng)",不尊重原創(chuàng)的行為TMT觀察網(wǎng)或?qū)⒆肪控?zé)任;
3.作者投稿可能會(huì)經(jīng)TMT觀察網(wǎng)編輯修改或補(bǔ)充。
