會玩更會干 星動紀元發布全尺寸人形機器人星動L7快訊
機器人完成實時反饋來抗干擾,1.全域操作空間覆蓋 星動 L在全尺寸人形機器人中具有出色大臂展配合腰部3自由度,4.采用端到端VLA大模型ERA-42 ERA-42模型讓星動L7通過觀看人類操作視頻直接學技能。
【TechWeb】7月22日消息,近日,具身智能企業星動紀元正式發布新一代全尺寸高性能人形機器人星動L7。
據介紹,這款身高171 cm的雙足機器人,既能完成360°旋轉爆發跳、街舞Breaking等高動態“整活”動作,又能在物流、工廠實現分揀、掃碼、打螺絲,還能完成撕紙巾、拉窗簾等操作,是國內首個由VLA大模型驅動、具備全身55個自由度的雙足人形機器人。
公開資料顯示,星動紀元成立于2023年8月,是清華大學唯一持股的具身智能企業。日前,星動紀元宣布完成近5億元A輪融資,鼎暉VGC和海爾資本聯合領投,厚雪資本、華映資本、襄禾資本、豐立智能等財務機構及產業資本跟投,老股東清流資本、清控基金等機構繼續追加投資。
全尺寸雙足人形機器人會“整活”,需要本體性能和大腦能力雙突破
全尺寸雙足人形機的高動態“整活”,技術難度遠超小尺寸機型:65 kg體重需更強關節扭矩平衡重心,171 cm身高對肢體協同精度要求更高。據介紹,星動L7以“動力-結構-控制”全鏈條突破,精準破解大尺寸機型痛點:
1.頂尖關節電機提供“動力核心”
400 N·M峰值扭矩確保65 kg體重下,腿部關節能瞬間爆發力量完成旋轉跳的起跳、騰空;25 rad/s峰值轉速讓關節0.1秒內完成姿態調整,避免失衡。
2.關節準直驅+模塊化結構達成“抗沖擊+輕量化”
星動L7采用關節準直驅方案,配合全棧自研模塊化骨架,解決“強度與靈活性”矛盾:準直驅省去傳統減速器,減少動力損耗,結構更緊湊,且力反饋精度更高,能實時感知沖擊力并調整輸出;核心骨架用航空級鋁合金與碳纖維復合材料,可承受瞬時爆發壓力,同時將重量控制在65 kg,避免抵消動力優勢。
3.通過端到端強化學習破解 “運動平衡”
55 個自由度與端到端強化學習算法構建 “超靈活 + 自適應” 控制體系:全身 55 個自由度形成協同網絡,通過算法實現毫秒級關節聯動 —— 旋轉跳時,腰部調整軀干角度、手臂擺動抵消離心力、腿部精準控制落地位置,多維度姿態修正確保重心穩定;端到端強化學習基于運動數據訓練,建立 “傳感器數據 - 關節動作” 直接映射:無需人工設計平衡規則,動態調整 55 個關節的輸出力度與角度,在 360° 旋轉跳、街舞 Breaking 等高動態動作中,通過持續與環境交互優化動作策略,實現 “失衡即修正” 的實時平衡姿態控制。
能上肢靈巧操作,機器人才能真正從表演走向車間
據介紹,星動L7不止勝任重復任務,更能快速學習新技能,適配多場景復雜需求,成為“通用生產力工具”,核心在于硬件革新與模型賦能:
1.全域操作空間覆蓋
星動 L在全尺寸人形機器人中具有出色大臂展配合腰部3自由度,構建2.1米直徑球形操作空間,覆蓋桌面到貨架全域作業范圍。
2.十軸手腕突破角度局限
側擺±45°,前后±90°的十軸手腕設計,打破“操作角度固定”局限。如在工業裝配中,面對傾斜接口、隱蔽螺絲位,無需頻繁轉動機身即可完成對接,提升復雜工況成功率。
3.全直驅五指靈巧手
每指獨立驅動,復現人類手部操作動作 ;每秒可完成10次獨立手指姿態調整,電子裝配中能快速銜接“擰螺絲-掃碼-貼標”工序; 協同7軸仿生機械雙臂合計負重20 kg搬運物料,也能操作移液器、螺釘槍等工具,適配制造業柔性生產。
4.采用端到端VLA大模型ERA-42
ERA-42模型讓星動L7通過觀看人類操作視頻直接學技能,降低數據成本,快速切入新場景。此外,ERA-42的“長序列任務預判與抗干擾”也是適應復雜場景的關鍵。依靠ERA-42(30 Hz以上)高頻的模型推理,機器人完成實時反饋來抗干擾;通過ERA-42視頻預測能力,機器人提前完成動作的規劃,確保操作“穩準狠”。
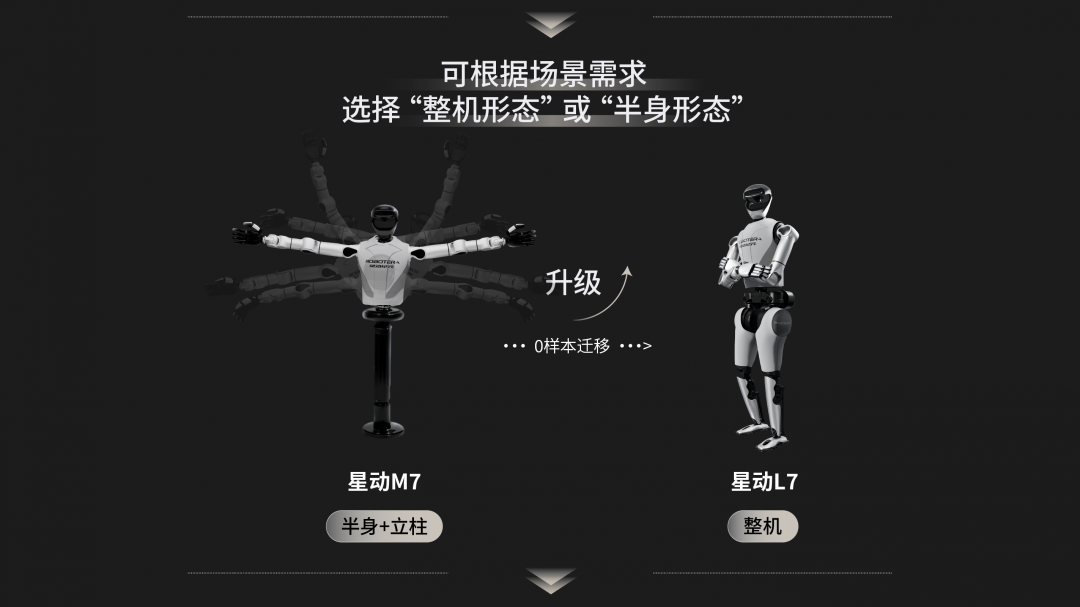
商業化上,星動L7推出全球首創“全尺寸+半身形態”切換方案, 即工業場景選用半身形態:減少空間占用,適配電子裝配車間等緊湊環境;商服場景選用全尺寸形態:360°旋轉跳、街舞舞蹈等動態表現。這種模塊化設計降低單場景部署成本,驗證了“按需定制”的商業化可行性。
據報道,在全球市值TOP 10的科技巨頭中,9家為星動紀元客戶;截至6月,今年已累計交付超200臺產品,另有上百個訂單在量產交付中;目前所有訂單中,50%以上來自海外客戶。
1.TMT觀察網遵循行業規范,任何轉載的稿件都會明確標注作者和來源;
2.TMT觀察網的原創文章,請轉載時務必注明文章作者和"來源:TMT觀察網",不尊重原創的行為TMT觀察網或將追究責任;
3.作者投稿可能會經TMT觀察網編輯修改或補充。
